Thiết bị (RD, RM) được vặn vào bộ chuyển đổi bằng đai ốc liên hợp (kết nối ren của Mỹ) - điều này cho phép bạn để thân ở vị trí cố định khi kết nối mà không cần xoay nó quanh trục của nó. Trong một thiết bị như vậy, một miếng đệm cao su dưới đai ốc liên hiệp đảm bảo độ kín của kết nối, nhưng có những loại thiết bị khác với một phụ kiện cố định có ren ngoài hoặc ren trong không có miếng đệm. Trong trường hợp này, sợi lanh hoặc một loại chỉ đặc biệt để chống thấm cho phụ kiện vệ sinh được sử dụng để bịt kín; tùy chọn lắp chất bịt kín từ băng FUM phổ biến không hiệu quả lắm - nó thường bị cắt bằng các sợi sắc.
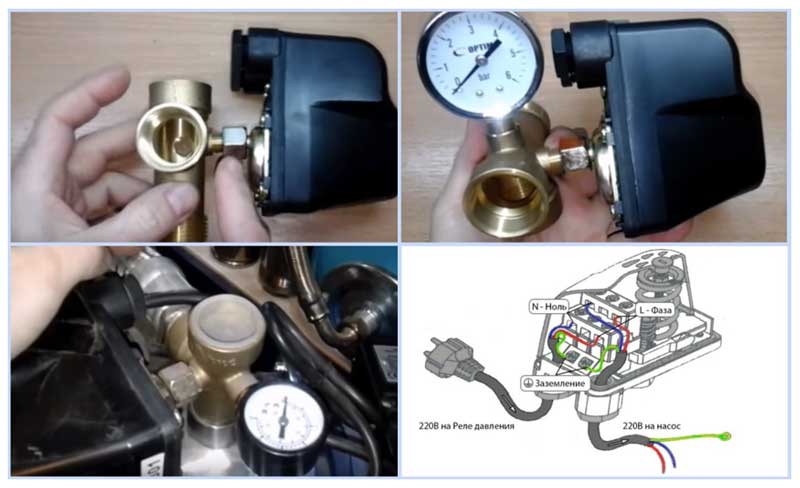
Kết nối thiết bị với điện áp xoay chiều 220 vôn không gây ra bất kỳ khó khăn cụ thể nào - hai đầu của một trong các dây nguồn của máy bơm điện được kết nối với các đầu cực M1 và M2 và được cố định bằng vít, nếu có dây nối đất trong nguồn điện, nó được kết nối với khối nằm ở phần dưới của hộp, bằng một tấm áp lực và một vít.
Cơm. 8 Rơ le trong tự động hóa máy bơm chìm - sơ đồ kết nối thông qua một khớp nối năm chiều
Bộ chuyển đổi áp suất có ba loại, cho phép đo áp suất tuyệt đối, chênh lệch và áp kế.
Áp suất tuyệt đối, chẳng hạn như áp suất khí quyển, được đo bằng cảm biến áp suất tuyệt đối. Áp suất được đo so với chân không.
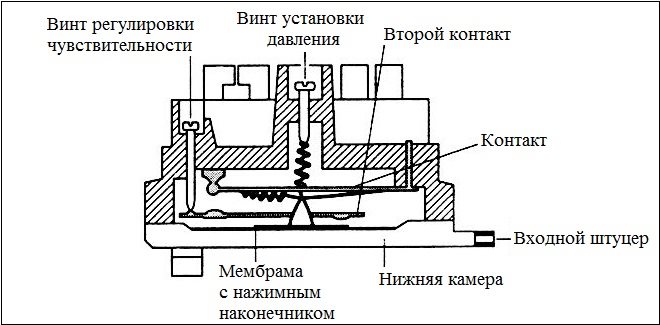
Áp suất chênh lệch, chẳng hạn như chênh áp trong đồng hồ đo lưu lượng chênh lệch, được đo bằng cảm biến chênh lệch áp suất (hình 1).
Cơm. 1. Sơ đồ cấu tạo cảm biến chênh lệch áp suất.
Áp suất đồng hồ đo được đo tương đối với một số giá trị tham chiếu. Một ví dụ là phép đo huyết áp, được thực hiện so với áp suất khí quyển. Đồng hồ đo áp suất thực chất là một biến thể của áp suất chênh lệch. Đo áp suất dư so với khí quyển bằng áp kế.
Trong cảm biến áp suất, đầu dò thứ cấp kiểu điện dung cũng được sử dụng. Trong các thiết bị như vậy, toàn bộ bề mặt của màng hoạt động như một tấm tụ điện. Một đế kim loại cố định được sử dụng như một bản của tụ điện, bản còn lại là một màng dẻo hình tròn được cố định xung quanh chu vi. Màng uốn cong dưới áp lực. Khi màng bị biến dạng, khoảng cách trung bình giữa các bản tụ điện giảm xuống dẫn đến điện dung tăng.
Việc sử dụng công nghệ MEMS giúp có thể thu được các đơn vị vi cơ và quang học có kích thước nhỏ hơn so với các công nghệ truyền thống. Ưu điểm của MEMS là phần điện tử và các kết nối điện với cảm biến và cơ chế, được thực hiện bằng công nghệ tích hợp và có kích thước nhỏ. Khả năng lặp lại cao của các phần tử nhạy cảm và chế tạo tích hợp của chúng cùng với mạch xử lý, có thể cải thiện đáng kể độ chính xác của phép đo. Nhờ công nghệ tích hợp, độ tin cậy của MEMS cao hơn độ tin cậy của một hệ thống tương tự được lắp ráp từ các thành phần rời rạc. Ngoài ra, các hệ thống quang học có độ tin cậy và độ bền cao hơn, vì chúng được đặt trong một hộp kín và được bảo vệ khỏi các ảnh hưởng của môi trường. Việc sử dụng MEMS làm giảm chi phí của cả bộ phận cơ khí và điện tử của thiết bị, vì thiết bị điện tử xử lý và MEMS được tích hợp trên một đế duy nhất, điều này tránh được các kết nối bổ sung và trong một số trường hợp, sử dụng các mạch phù hợp.
Cảm biến áp suất được lắp đặt như một thiết bị riêng biệt trong hầu hết các hệ thống điều khiển tự động, nó cũng là một phần của khối điều khiển thiết bị bơm thế hệ thứ 2 và thứ 3, trong đó tất cả tự động hóa được đặt trong một vỏ.
Cơm. 5 Sơ đồ rơ le trên ví dụ về mô hình RD 2
Dấu hiệu chính của sự cố cảm biến là thiếu thông tin về mức áp suất trong bánh xe trên màn hình. Nguyên nhân có thể là do pin sử dụng quá hạn, tín hiệu thông tin yếu, lỗi cơ trong quá trình lắp đặt. Theo quy định, bắt buộc phải thay thế cảm biến bị lỗi bằng một cảm biến mới. Nếu tín hiệu thông tin từ anten cảm biến yếu, nên xác định vị trí hiệu quả nhất bằng cách quay đầu. Thay pin thường là một thao tác khó về mặt kỹ thuật, yêu cầu lốp phải khớp với vị trí bên trong của cảm biến và có thể không cho kết quả như mong đợi.
VIDEO ipt>
Các trục trặc chính của cảm biến là:
có thể khắc tất cả các cảm biến cao su đồng bên ngoài và bên trong;
dính của một cảm biến nhôm bên ngoài với một van bằng đồng;
hoạt động sai của hệ thống ABS trong một thời gian dài.
Trong một số hệ thống TPMS, nhược điểm là:
độ sáng thấp và số hiển thị nhỏ;
hiển thị các chỉ số của một lốp duy nhất trên màn hình với nhu cầu gọi dữ liệu của các bánh xe khác trên màn hình bằng cách nhấn nút;
nhiễu sóng bộ đàm, máy bộ đàm khi đưa thông tin lên màn hình;
nhu cầu lắp lốp thay thế pin của các cảm biến bên trong;
nguy cơ bị đánh cắp các cảm biến bên ngoài;
thiếu cài đặt cho các thông số áp suất;
không thể tắt tín hiệu âm thanh;
sự khác biệt giữa kích thước của phích cắm của thiết bị và bật lửa trên ô tô;
yêu cầu về cân bằng bổ sung khi lắp đặt cảm biến bên ngoài.
Các thử nghiệm được thực hiện đã cho thấy chất lượng cao của các hệ thống giám sát áp suất lốp không đạt tiêu chuẩn sau đây,
với các cảm biến bên trong:
CRX-1006 (chất lượng cao, hiệu suất đáng tin cậy);
TPMS CRX-1001 (thông tin thời gian thực, số lượng lớn, dung lượng pin cao);
TPMS-201 (cài đặt dễ dàng);
Parkmaster 4-03 (lắp đặt mô-đun màn hình vào bật lửa, độ sáng màn hình);
với các cảm biến bên ngoài:
CRX-1041 (đặt nhanh, dải áp suất rộng);
CRX-1002 (chống ăn mòn và chống trộm).
Hệ thống giám sát áp suất lốp đang trở thành điều kiện tiên quyết để nâng cao độ an toàn và độ bền của xe. Hiện nay, ở một số quốc gia, việc sản xuất máy móc có lắp đặt tùy chọn này được xác định về mặt pháp lý.Trên thị trường, những người đam mê ô tô có thể độc lập lựa chọn và lắp đặt cảm biến áp suất lốp tpms phù hợp với khả năng ngân sách, mức độ hoạt động và kiểm soát các thông số cần thiết.
Tính năng thiết kế
Như đã nói ở trên, có cả loại công tắc áp suất nước cơ và điện tử. Đối với cả hai, cơ quan hoạt động chính là màng, hoạt động như một trong những bức tường của vật chứa bên trong của chúng, để nước đi vào. Bị lệch dưới áp lực của nước, màng tác động lên các phần tử còn lại của cảm biến, kết quả là thiết bị được kích hoạt.
Thiết bị cảm biến áp suất màng
Các phần tử bị ảnh hưởng bởi màng lệch trong cảm biến cơ học là các tiếp điểm mà khi đóng hoặc mở sẽ bật và tắt thiết bị bơm. Cảm biến áp suất điện tử hoạt động trên một nguyên tắc hơi khác. Sự biến dạng của màng trong một thiết bị như vậy được chuyển đổi thành tín hiệu tương tự điện điều khiển, tín hiệu này sau đó được khuếch đại, số hóa và đưa đến bộ phận điều khiển tự động của đường ống.
Cảm biến áp suất cơ học, còn được gọi là tiếp điểm, được sử dụng thường xuyên hơn so với cảm biến điện tử. Điều này được giải thích bởi sự đơn giản trong thiết kế của một thiết bị như vậy và chi phí hợp lý hơn của nó. Đặc biệt, cảm biến áp suất nước dạng cơ thường xuyên được lắp đặt trong các hệ thống cấp thoát nước và sưởi ấm sinh hoạt.
Thiết bị công tắc áp lực nước gia đình
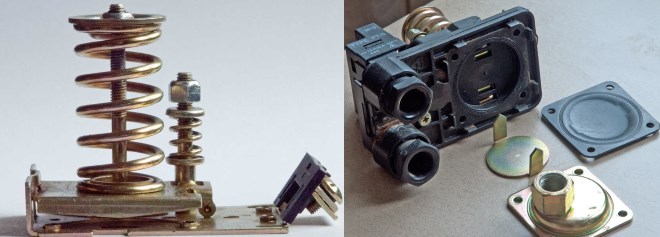
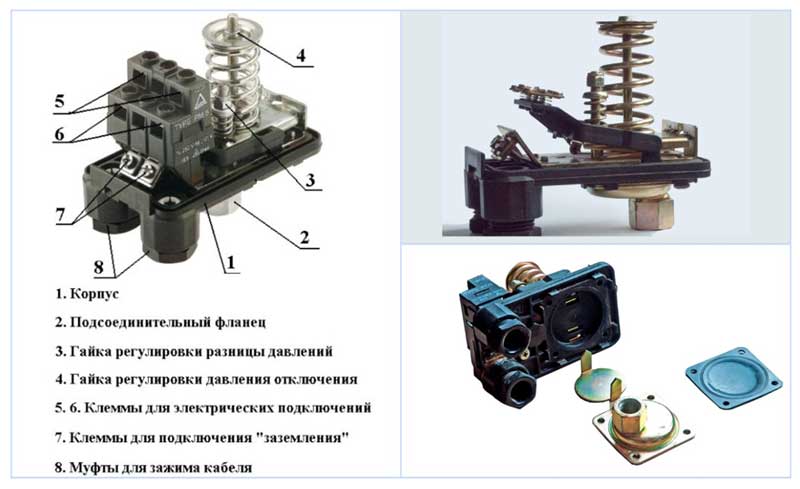
Thiết kế của cảm biến cơ học là:
ống nhánh, với sự trợ giúp của thiết bị được kết nối với các phần tử của đường ống;
màng bọc;
liên hệ với nhóm;
hai lò xo có đường kính khác nhau, qua đó đặt mức áp suất tối đa và tối thiểu mà thiết bị sẽ hoạt động.
Cảm biến áp suất tháo rời
Một lò xo có đường kính lớn hơn, được lắp đặt trong các cảm biến kiểu cơ học, xác định mức áp lực nước trong đường ống tại đó thiết bị sẽ hoạt động và tắt máy bơm cung cấp. Lò xo thứ hai chịu trách nhiệm về giới hạn thấp hơn phản hồi của cảm biến, hay nói chính xác hơn là phạm vi giá trị mà cảm biến sẽ bật và khởi động máy bơm cung cấp nước cho đường ống.
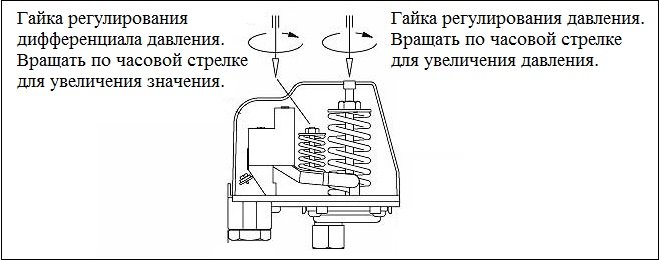
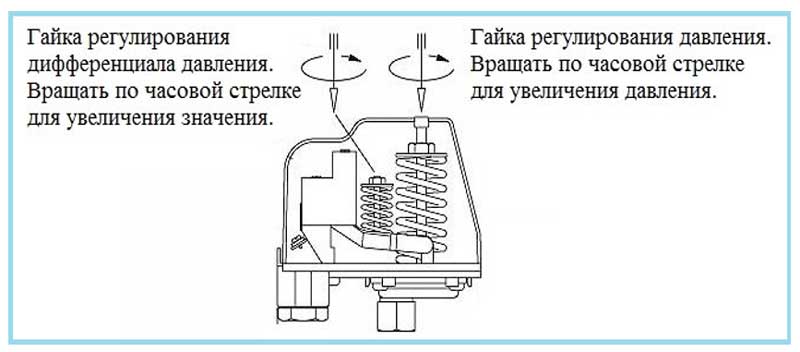
Thiết kế của cảm biến cơ học cung cấp khả năng điều chỉnh mức độ nén của cả hai lò xo. Khi một lò xo có đường kính lớn hơn bị nén, giá trị của áp suất nước mà thiết bị sẽ hoạt động sẽ tăng lên. Nếu bạn nén một lò xo có đường kính nhỏ hơn, thì sự chênh lệch áp suất giữa các mức phản ứng sẽ tăng lên.
Nguyên lý điều chỉnh cảm biến áp suất cơ học
Cài đặt và thiết lập
Hệ thống kiểm soát áp suất tiêu chuẩn được lắp đặt tại các nhà máy không yêu cầu các hành động bổ sung. Nó chỉ cần thiết để kiểm tra định kỳ sức khỏe của các nút hệ thống.
Một hệ thống bổ sung ở dạng cảm biến với thông tin màu sắc của mức áp suất được lắp đặt trên các núm thay cho các nắp bảo vệ.
Một hệ thống làm việc tự do dưới dạng các cảm biến bên ngoài có chức năng truyền thông tin yêu cầu bộ thu được cài đặt trong bảng điều khiển và kết nối với một trong các thiết bị cabin có màn hình.
Một hệ thống với các cảm biến bên trong yêu cầu lắp đặt các cảm biến bên trong lốp xe thay vì van, cài đặt trước đơn vị về mức áp suất tối thiểu và tối đa cũng như cài đặt cảnh báo.
Việc đăng ký, kích hoạt, các cảm biến điện tử được thực hiện theo một vòng tròn - đầu tiên là bánh trước bên trái, sau đó là bánh trước bên phải, phía sau bên phải và phía sau bên trái.
VIDEO Các hệ thống thường xuyên và tự lắp đặt cung cấp khả năng kiểm soát áp suất chất lượng cao phù hợp với cấp kỹ thuật của sản phẩm.
Kiểm tra cảm biến áp suất lốp
Các chỉ số của cảm biến được kiểm tra bằng các phép đo điều khiển áp suất với đồng hồ đo áp suất thông thường. Độ chính xác của chúng là 0,1 bar, là khá đủ. Việc kiểm tra sâu hơn các cảm biến và toàn bộ hệ thống được thực hiện bằng các thiết bị đặc biệt.Nếu cảnh báo áp suất thấp vẫn bật, bạn nên làm như sau:
kiểm tra cẩn thận bánh xe bằng mắt thường để tìm các khuyết tật;
bơm đến các thông số yêu cầu trong một cửa hàng lốp xe;
lái xe trong một thời gian với tốc độ không quá 80 km / h.
Tín hiệu lỗi sẽ dừng lại và hệ thống sẽ hoạt động bình thường.
Đặt lại cảm biến áp suất lốp
Nếu lỗi vẫn còn trên màn hình, bạn nên xả hơi hoàn toàn bánh xe và bơm căng lại, cũng như khởi động lại thiết bị phần mềm hệ thống kiểm soát áp suất (máy tính trên bo mạch, thiết bị theo dõi đặc biệt, v.v.).
VIDEO Tắt cảm biến áp suất lốp
Trong trường hợp một trong các cảm biến bị trục trặc, trước khi thay thế nó, được phép tắt nó đi. Cảm biến áp suất được tắt theo hướng dẫn của hệ thống. Trong trường hợp này, hệ thống tiếp tục điều khiển 3 bánh xe còn lại. Nếu không có nút tắt tín hiệu âm thanh, nó được phép ngắt kết nối cảm biến bị lỗi khỏi thiết bị.
Ví dụ về hoạt động của bộ biến tần trên giá trình diễn
Trên khắp thế giới, bộ biến tần đã được sử dụng để điều khiển máy bơm từ lâu. Thật không may, ở Nga, kỹ thuật này vẫn chưa bắt đầu phát triển. Hãy cho bạn biết vẻ đẹp của những chiếc hộp nhỏ, không phức tạp này là gì và điểm cộng lớn mà chúng mang lại cho người tiêu dùng khi chúng được sử dụng trong hệ thống cấp nước tư nhân là gì.
Bộ biến tần là gì? Theo quy định, chủ sở hữu của các ngôi nhà và khu nhà nhỏ sử dụng máy bơm giếng khoan chìm trong hệ thống cấp nước của họ. Các máy bơm này được điều khiển bằng công tắc áp suất và bộ tích áp thủy lực với nhiều công suất khác nhau.
Công tắc áp suất có hai ngưỡng: trên và dưới. Với một thiết bị của hệ thống cấp nước như vậy, lúc bật máy bơm, áp suất giảm xuống rất nhiều và điều này gây khó chịu cho người tiêu dùng. Anh ấy cảm thấy khó chịu vì áp lực thay đổi. Điều này đặc biệt đúng khi tắm. Các chủ nhà nghỉ đều nhận thức được điều này, vì họ đã gặp phải vấn đề này. Đối với những người chuẩn bị trang bị hệ thống cấp nước của họ, thông tin này sẽ giúp mang lại hiệu quả mong đợi.
Làm thế nào để cải thiện sự thoải mái để áp suất trong hệ thống là không đổi? Có một giải pháp cho vấn đề này. Đây là ứng dụng của bộ biến tần. Nhiều công ty cung cấp chastotniki Italtecnica. Mối quan tâm này tạo ra các bộ biến tần với máy bơm một pha của dòng SIRIO ENTRY. Các bộ biến tần này có thể điều khiển máy bơm một pha lên đến 1,5 kilowatt.
Các mô hình cảm biến là gì
Có các cải tiến cơ học và điện tử của cảm biến, đối với cấp nước sinh hoạt sử dụng máy bơm điện chìm và trạm bơm thuộc loại bình dân và giá trung bình, các mô hình cơ học của thiết bị này được sử dụng chủ yếu. Chúng được đặc trưng bởi độ tin cậy cao, thiết kế đơn giản, dễ lắp đặt và điều chỉnh.
Việc sử dụng các cảm biến áp suất điện tử đắt tiền trong các hệ thống lấy nước thông thường chỉ để mở các tiếp điểm là không có ý nghĩa, các thiết bị điện tử được thiết kế để điều khiển trơn tru các chế độ hoạt động của thiết bị bơm.
Cơm. 6 Thiết bị điều khiển tự động với cảm biến tích hợp
Cảm biến nước điện tử
Cảm biến áp suất thủy lực điện tử được sử dụng trong điều khiển tự động thiết bị bơm thế hệ thứ 3 với bộ biến tần; chúng là một phần của bộ điều khiển điện tử bao gồm một đơn vị kích thước nhỏ.
Thiết bị điện tử thay thế tất cả các yếu tố rời rạc của hệ thống tự động hóa - công tắc áp suất và chạy khô, đồng hồ đo áp suất, bộ tích lũy thủy lực khối lượng lớn, cung cấp khả năng khởi động trơn tru của động cơ điện và điều khiển điện tử tốc độ quay của động cơ bơm trục.Trong thiết bị này, một tín hiệu tương tự được lấy từ cảm biến điện tử, giá trị điện áp của nó phụ thuộc vào áp suất, sau đó nó được chuyển đổi trong mạch điều khiển điện tử thành điện áp điều chế độ rộng xung cung cấp cho cuộn dây động cơ bơm.
Trong cuộc sống hàng ngày, bộ điều khiển tần số đặc biệt SU 301 của Grundfos, kết hợp với máy bơm điện chìm của dòng SQ, được biết đến và sử dụng rộng rãi, các mẫu và nhà sản xuất nổi tiếng khác là Active Driver (DAB), Sirio Entry (Italtecnica).
Cơm. 7 Kết nối cảm biến với nguồn cấp nước và mạng điện
Nguyên lý hoạt động
Hãy xem xét một cảm biến áp suất PM được lắp đặt trong một hệ thống cấp nước riêng lẻ, nó hoạt động như sau:
Áp lực do giếng hoặc máy bơm tạo ra góp phần làm đầy nước vào đường dây, áp lực này sẽ ép lên màng cao su nằm phía sau khớp nối công tắc áp suất.
Bên trong thiết bị, một tấm có hình nón nhọn nhô ra dọc theo các cạnh được đặt trên một màng đàn hồi; khi màng di chuyển dưới áp lực sâu vào trong thiết bị, tấm đồng thời dịch chuyển và các đầu của nó ép vào tấm làm mở các tiếp điểm điện bên trong vỏ. .
Vì một hoặc hai dây của cáp nguồn máy bơm điện được kết nối với các tiếp điểm, mạch điện sẽ mở và nguồn điện cung cấp cho động cơ điện ngừng lại, thiết bị ngừng hoạt động.
Khi sử dụng nước sinh hoạt, áp suất trong đường ống giảm xuống, màng rơ le trở về vị trí ban đầu, nới lỏng áp suất trên tấm, và các tiếp điểm bên trong thiết bị đóng lại - máy bơm điện bắt đầu hoạt động và bơm nước vào đường dây.
Cơm. 4 Cảm biến áp suất nước có thể tháo rời RM
Cài đặt
Xem xét rằng hầu hết các cảm biến lưu lượng nước là một phần cấu trúc của thiết bị, việc lắp đặt chúng chỉ được yêu cầu trong trường hợp thay thế trong trường hợp hỏng hóc. Tuy nhiên, có những tình huống khi cảm biến lưu lượng nước phải được lắp đặt riêng biệt, chẳng hạn như khi cần tăng áp lực của nguồn nước.
Thật vậy, các tình huống thường xảy ra khi hệ thống cấp nước trung tâm không đủ áp, và để bật lò hơi gas ở chế độ cấp nước nóng, cần phải tạo áp suất tốt. Trong trường hợp này, một máy bơm tuần hoàn bổ sung được lắp đặt, được trang bị cảm biến lưu lượng nước.
Trong trường hợp này, cảm biến được lắp sau máy bơm, vì vậy khi nước bắt đầu di chuyển, cảm biến sẽ bật máy bơm và áp lực nước tăng lên.
VIDEO Điều chỉnh và điều chỉnh
Khi sử dụng trong nước, người tiêu dùng thường thích các mẫu sản xuất trong nước rẻ tiền và đáng tin cậy - các cảm biến thuộc dòng RD-5, RM-5 và các sửa đổi khác nhau của chúng, để thiết bị được chọn hoạt động chính xác, thiết bị đó phải được cấu hình phù hợp cho thông số dòng. Cài đặt gốc cho các giá trị bật-tắt của rơle và theo đó, ngưỡng hoạt động của máy bơm của các thiết bị này là 1,4 - 2,8 bar.
Cơm. 9 Thông số kỹ thuật cho các loại rơ le phổ biến
Nếu đường dây chính nội bộ dài hoặc đường ống nằm trong nhà cao tầng thì phải cấu hình lại các giới hạn trên và dưới của vận hành rơ le. Nếu cần thiết phải thực hiện các hoạt động điều chỉnh, áp kế tích hợp đóng vai trò như một thiết bị điều khiển và đo lường, theo đó các số đọc được ghi lại, các hoạt động điều chỉnh được thực hiện theo trình tự sau:
Máy bơm điện bị ngắt kết nối với mạng điện, nắp trên của thiết bị được tháo ra để tiếp cận với hai vít điều chỉnh có lò xo, lò xo lớn nhất chịu trách nhiệm về ngưỡng trên và lò xo nhỏ có thể điều chỉnh chênh lệch giữa các giới hạn . Bằng cách xoay đai ốc trên một lò xo lớn, sẽ đạt được sự thay đổi trong ngưỡng áp suất trên - bằng cách quay theo chiều kim đồng hồ, giới hạn trên của hoạt động được tăng lên, bằng cách quay theo hướng ngược lại, khi lò xo bị yếu đi, giới hạn này sẽ giảm xuống.
Khi điều chỉnh bằng lò xo lớn, thực hiện nhiều vòng xoay đai ốc trên vít lớn theo chiều thuận, sau đó bơm điện được bật và thời điểm tắt được ghi trên đồng hồ áp suất.
Nếu các kết quả đọc không tương ứng với yêu cầu, chúng sẽ xả nước từ nguồn cấp nước bên trong và đợi máy bơm điện bật lại - khi đạt đến ngưỡng áp suất tối thiểu, rơ le sẽ khởi động.
Hoạt động được lặp lại định kỳ cho đến khi áp suất cắt của bơm điện đạt giá trị mong muốn theo chỉ dẫn của kim đồng hồ đo áp suất.
Sau khi thiết lập ngưỡng trên, họ bắt đầu quy định giới hạn dưới cho phép tối thiểu, trong khi cần lưu ý rằng sự khác biệt giữa các mức phản ứng biên ít nhất phải là 1,5 bar.
Bằng cách xoay đai ốc trên vít nhỏ theo hướng này hay hướng khác, bạn có thể đặt đồng bằng, sau khi điều chỉnh, nước được xả khỏi dòng đầy và theo đồng hồ áp suất, thời điểm rơ le bật máy bơm được cố định. Nếu không đạt đến giới hạn dưới yêu cầu, việc điều chỉnh và xả nước được lặp lại nhiều lần cho đến khi đạt được mức chênh lệch yêu cầu ít nhất là 1,5 bar.
Cần lưu ý rằng sự chênh lệch giữa các ngưỡng càng lớn thì máy bơm được bật ít thường xuyên hơn và khi máy bơm hoạt động ở chế độ này, tuổi thọ của nó và các thiết bị tự động khác sẽ tăng lên.
Cơm. 10 Cài đặt và điều chỉnh cảm biến áp suất nước
VIDEO
Tùy chọn cảm biến
Vì lý do an ninh, một quyết định bắt buộc phải lắp đặt các hệ thống tiêu chuẩn ở Hoa Kỳ và các nước EU, đồng thời cũng gây ra việc sản xuất các hệ thống để tự lắp đặt.
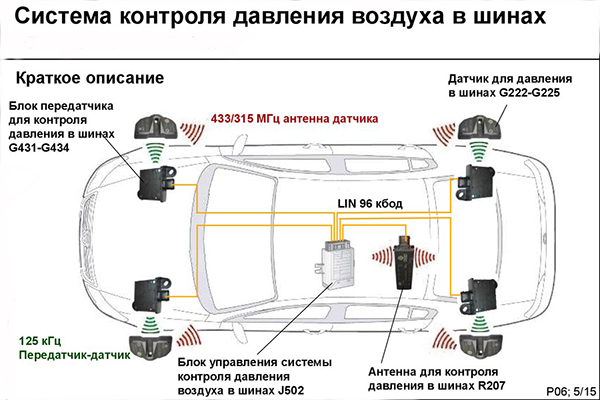
Cảm biến là cơ khí và điện tử, lắp đặt bên trong và bên ngoài, điều khiển trực tiếp hoặc gián tiếp.
Cảm biến áp suất lốp
Các cảm biến thường xuyên được lắp đặt tại nhà máy trong quá trình sản xuất máy móc và được kết nối với một bộ phận máy tính. Thông tin về mức áp suất cụ thể được hiển thị trên màn hình hoặc trên gương lùi. Trong trường hợp cảm biến bị hỏng, chỉ có thể thay thế với kiểu máy tương tự. Các cảm biến trong nhà có độ chính xác cao được sử dụng.
Việc sử dụng cảm biến ABS để phát hiện sự giảm áp suất bằng cách sử dụng các chương trình thay đổi tốc độ của bánh xe phẳng cũng được thực hành rộng rãi trong các nhà máy sản xuất xe hơi. Điều này rẻ hơn nhiều, nhưng chỉ xác định được thực tế là áp suất không đủ, mà không cần cố định mức thực tế.
Cảm biến áp suất lốp bên ngoài
Việc sản xuất các hệ thống sử dụng cảm biến bên ngoài và bên trong để lắp đặt vào máy móc đã được thiết lập trên thế giới.
Đơn giản nhất là các hệ thống có gắn cảm biến trên núm vú. Mức áp suất có thể được thông báo cho người lái xe theo nhiều cách khác nhau:
màu tương ứng của nắp cảm biến (màu xanh lá cây cho áp suất trên 2 bar, màu vàng cho 1 đến 2 bar và màu đỏ cho dưới 1 bar);
thông qua hệ thống Bluetooth đến thẩm mỹ viện hoặc thiết bị di động Android hoặc iOs của bạn;
trên màn hình được cung cấp.
Nhược điểm chính là không thể thu được thông tin về áp suất trong quá trình chuyển động.
TPMS với cảm biến bên trong
Các cảm biến bên trong, được mua thêm để lắp đặt hệ thống điều khiển, tương tự như các cảm biến của hệ thống thông thường. Chúng được đặt bên trong bánh xe thay vì van. Việc không có phần mềm yêu cầu bạn phải mua thêm màn hình hoặc sử dụng kênh Bluetooth để truyền thông tin đến tiệm hoặc thiết bị di động của bạn. Hệ thống cung cấp độ chính xác dữ liệu cao và cho phép tùy chỉnh thêm các tín hiệu thông tin. Việc lắp đặt các cảm biến và bảo dưỡng chúng yêu cầu các thao tác lắp lốp.
Đề xuất cài đặt
Khi đặt một cảm biến áp suất trong đường dây, phải tuân theo các khuyến nghị sau:
Để thiết bị hoạt động chính xác, phạm vi nhiệt độ mà thiết bị được vận hành không được vượt quá -4 - +40 C.
Tự động hóa không chỉ được đặt trong nhà, mà còn trong giếng caisson, sau máy bơm, các bộ lọc để lọc nước sâu và tốt nên được lắp đặt trong đường dây - điều này sẽ ngăn việc lắp với màng khỏi bị bám bụi bẩn, có thể dẫn đến để hoạt động không chính xác của thiết bị.
Nhiều thiết bị được thiết kế để chỉ hoạt động với nước lạnh; trong quá trình hoạt động, nhiệt độ của thiết bị không được vượt quá giới hạn cho phép, ví dụ, không quá +55 C. đối với kiểu RD.
Công suất của máy bơm điện được kết nối qua thiết bị không được vượt quá các giá trị được chỉ định trong dữ liệu hộ chiếu - vi phạm quy tắc này có thể dẫn đến dính các tiếp điểm và hỏng rơ le.
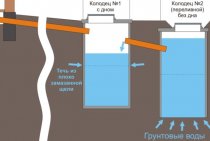
Cơm. 11 Ví dụ về vị trí của rơ le thủy lực với bơm điện giếng sâu
Cảm biến áp suất hoặc công tắc áp suất là thiết bị chính để đảm bảo hoạt động tự động của thiết bị lấy nước; nó là một phần của bất kỳ trạm bơm điện hoặc hệ thống cấp nước nào có máy bơm điện giếng sâu. Việc lắp đặt và điều chỉnh nó không gây ra bất kỳ khó khăn cụ thể nào ngay cả đối với một chủ nhà không chuẩn bị trước và việc tuân thủ các quy tắc cơ bản về vị trí và lắp đặt sẽ đảm bảo hoạt động của thiết bị không bị gián đoạn trong suốt một thập kỷ.
VIDEO
Các loại
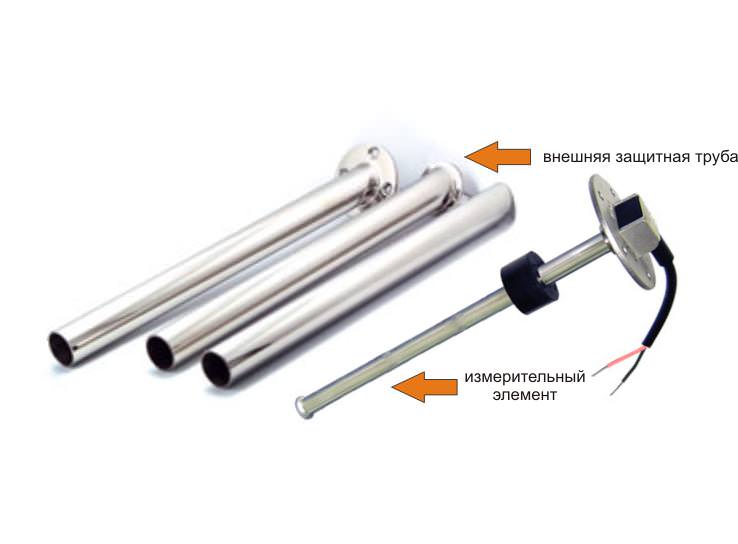
Ngày nay, hai loại cảm biến lưu lượng nước đã được tìm thấy ứng dụng lớn nhất - cảm biến Hall và rơ le sậy.
Cảm biến đo lưu lượng nước, dựa trên nguyên lý hoạt động của cảm biến Hall (nó còn được gọi là đồng hồ đo lưu lượng), là một tuabin nhỏ, trên đó có gắn một nam châm. Khi tuabin quay, nam châm sẽ tạo ra từ trường và giống như tuabin trong nhà máy thủy điện, nó tạo ra các xung điện nhỏ truyền tới bảng điều khiển của lò hơi. Tốc độ quay của tuabin phụ thuộc vào tốc độ cung cấp nước, lưu lượng càng lớn thì các xung càng rõ. Như vậy, nhờ cảm biến Hall, có thể không chỉ báo hiệu lưu lượng nước mà còn cả tốc độ cấp nước.
Cảm biến lưu lượng nước sậy là loại cảm biến dựa trên nguyên lý hoạt động của nam châm. Về cơ bản, cảm biến này trông như thế này - bên trong buồng làm bằng vật liệu composite có một phao từ tính, khi áp suất nước tăng lên, phao sẽ di chuyển xung quanh buồng và tác động lên công tắc cây lau.
Công tắc sậy, và đây chỉ là hai tấm từ tính trong một buồng không có không khí, sẽ mở ra dưới tác động của từ trường của phao, và bảng điều khiển sẽ chuyển lò hơi sang chế độ nước nóng.
Cảm biến mực nước sậy:
Đồng hồ đo lưu lượng nước:

 Cơm. 1 Nguyên lý hoạt động của cảm biến báo mức phao (PDU)
Cơm. 1 Nguyên lý hoạt động của cảm biến báo mức phao (PDU)